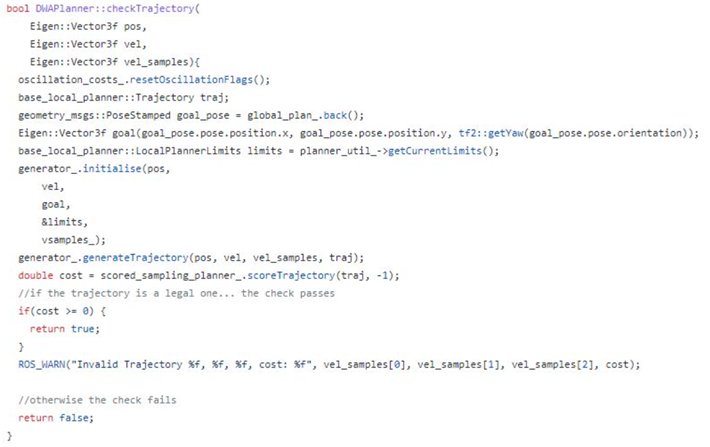
On 17th of Nov. we have deepened the specification of the check Trajectory function within the local planner of the robotic use case.
This step brings us further towards creation of horizontal abstraction for the digital twin creation.
WP5 – Specification of the check Trajectory